
Tracks
Challenges in the Mechatronics track require a combination of mechanical, electrical, programming and control skills. You will need to exhibit your skills in these fields to complete the challenges.
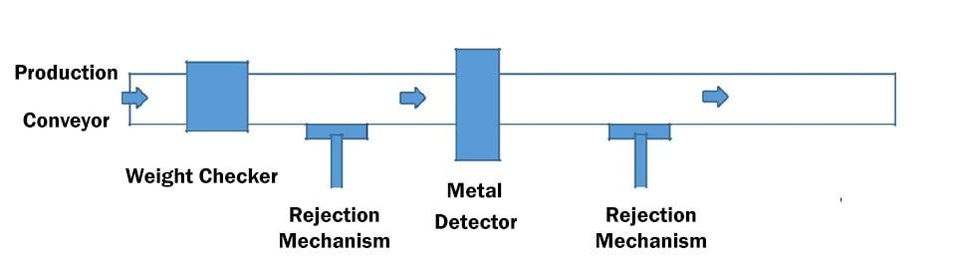
Challenge 1: Combination Systems: Weight Checker and Metal Detector with Rejection mechanisms
|
Introduction:
Quality control measures is pushing manufacturers to expand production process and take more quality stages. The need for control over product weight, and detect enclosed metals, requests development for combination system to control both aspects. |
Challenge by:
|
Problem:
1- Produced product pass over conveyor overweight, or underweight.
2- Produced product pass over conveyor with metal part inside.
Goals:
Development of combination system for weight checking and metal detection to reject products that are out of
acceptable weight range or that includes metal inside.
Methods:
YouTube Videos:
1- Weight Checker
https://www.youtube.com/watch?v=aefX__E7kmE
2- Metal Detectors:
https://www.youtube.com/watch?v=do0mzKHERHs
https://www.youtube.com/watch?v=3UYGk9MDIFQ
Conclusion:
The need for more quality measures is increasing and the combination system for detecting metal and weighing products will be of great value in many industries to discard rejected parts.
YouTube Videos:
1- Weight Checker
https://www.youtube.com/watch?v=aefX__E7kmE
2- Metal Detectors:
https://www.youtube.com/watch?v=do0mzKHERHs
https://www.youtube.com/watch?v=3UYGk9MDIFQ
Conclusion:
The need for more quality measures is increasing and the combination system for detecting metal and weighing products will be of great value in many industries to discard rejected parts.
Challenge 2: Robot End Effector: Screwdriver Feeder System with Torque Control and Feedback
|
Introduction:
As the industrial automation steps forward, arises the need for the low cost automation components. The robotic screw driving application relies on external screw feeder that delays the process time. Substitution of external feeder with internal screw feeder decrease process time and speeds up the production rate. |
Challenge by:
|
Problem:
The process of robotic screw driving with external screw feeder is composed of the following steps:
1- Picking screw from external screw feeder.
2- Placing screw into screw hole.
3- Screw driving into place at the specified torque.
4- Sending feedback OK/NOK (success/fail) of screwing to the specified torque to the robot control system.
The dependency on external screw feeder delays fastening process and doubles the cycle time.
Goals:
Development of screw driver for robotic systems with internal feeder. Screw driver should be able to reach the
required torque and send feedback to robot control after completion or not completion of the process.
The process of robotic screw driving and feeder will be composed of the following steps:
1- Screw fed into end of feeding tube.
2- Feeder opens to feed screw into place.
3- Screw driving into place at the specified torque.
4- Sending feedback OK/NOK to the robot control system.
The process of robotic screw driving with external screw feeder is composed of the following steps:
1- Picking screw from external screw feeder.
2- Placing screw into screw hole.
3- Screw driving into place at the specified torque.
4- Sending feedback OK/NOK (success/fail) of screwing to the specified torque to the robot control system.
The dependency on external screw feeder delays fastening process and doubles the cycle time.
Goals:
Development of screw driver for robotic systems with internal feeder. Screw driver should be able to reach the
required torque and send feedback to robot control after completion or not completion of the process.
The process of robotic screw driving and feeder will be composed of the following steps:
1- Screw fed into end of feeding tube.
2- Feeder opens to feed screw into place.
3- Screw driving into place at the specified torque.
4- Sending feedback OK/NOK to the robot control system.
|
Methods:
YouTube Videos: https://www.youtube.com/watch?v=sWLsM4Y7SD4 https://www.youtube.com/watch?v=Jl1Va7SLECI Conclusion: The goal of this project is development of complete screw driving system with feeder, torque control and feedback to reduce the cycle time and speed up the screw driving process. |

|
From the smallest cell in our body, to the largest skyscraper, they are all governed by Newtonian laws. Yet only a true mechanical engineer knows how to use these rules to display the best output, and this is what you will need to pass through challenges in this track.
Challenge 1: Robot End Effector: Screwdriver Feeder System with Torque Control and Feedback
|
Introduction:
As the industrial automation steps forward, arises the need for the low cost automation components. The robotic screw driving application relies on external screw feeder that delays the process time. Substitution of external feeder with internal screw feeder decrease process time and speeds up the production rate. |
Challenge by:
|
Problem:
The process of robotic screw driving with external screw feeder is composed of the following steps:
1- Picking screw from external screw feeder.
2- Placing screw into screw hole.
3- Screw driving into place at the specified torque.
4- Sending feedback OK/NOK (success/fail) of screwing to the specified torque to the robot control system.
The dependency on external screw feeder delays fastening process and doubles the cycle time.
Goals:
Development of screw driver for robotic systems with internal feeder. Screw driver should be able to reach the
required torque and send feedback to robot control after completion or not completion of the process.
The process of robotic screw driving and feeder will be composed of the following steps:
1- Screw fed into end of feeding tube.
2- Feeder opens to feed screw into place.
3- Screw driving into place at the specified torque.
4- Sending feedback OK/NOK to the robot control system.
The process of robotic screw driving with external screw feeder is composed of the following steps:
1- Picking screw from external screw feeder.
2- Placing screw into screw hole.
3- Screw driving into place at the specified torque.
4- Sending feedback OK/NOK (success/fail) of screwing to the specified torque to the robot control system.
The dependency on external screw feeder delays fastening process and doubles the cycle time.
Goals:
Development of screw driver for robotic systems with internal feeder. Screw driver should be able to reach the
required torque and send feedback to robot control after completion or not completion of the process.
The process of robotic screw driving and feeder will be composed of the following steps:
1- Screw fed into end of feeding tube.
2- Feeder opens to feed screw into place.
3- Screw driving into place at the specified torque.
4- Sending feedback OK/NOK to the robot control system.
|
Methods:
YouTube Videos: https://www.youtube.com/watch?v=sWLsM4Y7SD4 https://www.youtube.com/watch?v=Jl1Va7SLECI Conclusion: The goal of this project is development of complete screw driving system with feeder, torque control and feedback to reduce the cycle time and speed up the screw driving process. |

|
Challenge 2: 400 VDC datacenter
|
Description:
The supply of a data center using direct current has enormous potential. Not only does it offer the potential for saving energy. The quality of the DC-level power is better. This will result in the use of fewer components and, ultimately, greater reliability. Goals:
Team qualifications needed: Team must consists of Mechanical power & electrical engineers |
Challenge by: |
The programming language has pervaded into our everyday life objects, and the industrial needs for it are growing by the day. Deep knowledge and bright reasoning are needed to advance through the challenges in this track.
Challenge 1: Create trained models that can analyze network readings and send alerts for the predicted violated samples
|
Description:
Network is subjected to service outages, a case study done on sample frame of 100 network outages, found out that more than 40% of these incidents may have been predicted prior outage occurrence.The model needed is to make use of machine learning capabilities in prediction of such incidents and hence save the network availability. |
Challenge by: |
Goals:
Applying Machine learning techniques using Python to create trained models that can analyze network readings and send alerts for the predicted violated samples.
Timeline:
Team qualifications needed:
Applying Machine learning techniques using Python to create trained models that can analyze network readings and send alerts for the predicted violated samples.
Timeline:
- Milestone 1:. Environmental conditions violations Prediction.
- Milestone 2:. Battery Backup Degradation Prediction
- Milestone 3:Power Degradation Prediction.
- Milestone 4: Transmission Links Failure Prediction.
- Milestone 5: Core Nodes Performance Degradation Prediction
- Milestone 6: Fraud Detection.
Team qualifications needed:
- Machine Learning
- Mathematical models (Linear Regression - ARIMA) Python
Challenge 2: Service Management academy portal site to upload and share technical knowledge and processes
|
Description:
|
Challenge by: |
Challenge 3: Faculty of Engineering- Ain Shams University Way Finder
|
Description:
Design and implement a web application contains the Faculty Map and Way Finder System. |

|
Specifications:
Awards
The winning team will:
- The map should contain the accurate layout and exact locations of all the faculty buildings, areas, for example the labs, the classes, and the professors’ offices.
- Auto detection of the user GPS location in case a GPS device is used.
- The system should contain a way finding criteria so that the user can see the route, and instructions to the desired selected location either from its GPS location or from a location he/she selects from the interactive map or search for it.
- The user can search/select the source and destination locations in addition to the GPS facility mentioned above for the source location.
- All places should be distributed into categorized lists for example (Classes - Labs - Professors Rooms - Facilities).
- The system should be capable to be integrated with the Faculty of Engineering- Ain Shams University website to be viewed and work on a page inside it.
Awards
The winning team will:
- Take a challenge winning certificate.
- Integrate and publish the project on the website with the development team.
- Their names will be put on the website.
Whether it's creating a new connection or maintaining an existing one, connecting machines has become a vital part of our technology. Your network and communication will be tested, and you will need a lot of hard work and research to achieve the required results.
Challenge 1: Improve DC backup to survive longer with the lowest cost
|
Description:
We need a suitable/ valuable solution regarding our DC backup time (from 5-6 hours) in order to overcome the commercial power cut most of day hours especially at summer time. Team qualification needed: Power+Telecom |
Challenge by: |
Challenge 2: Make a design to overcome site failure at heavy load areas & increase power availability considering cost
|
Description:
Problem with low voltage issues @ delta & upper regions which is leading *most of time* to lose our VF network availability. Goals: Access Network Availability Team qualification needed: Power+Telecom |
Challenge by: |
Challenge 3: Make a design to decrease monthly consumption rate
|
Description:
Develop Access Network designs (especially for Macro-Indoor sites) in order save our monthly payments regarding our electricity & fuel consumption Goals: OPEX saving. Team qualification needed: Power+Telecom |
Challenge by |
Challenge 4: Telecom system to monitor meter remotely
|
Description:
We have new charging power meters for access sites and we need a valuable solution in order to keep monitoring it for 24/7 to be fully control on its charging payments also to prevent any down sites due to consume its charge amount. Team qualification needed: Power+Telecom |
Challenge by: |
Challenge 5: 400 VDC datacenter
|
Description:
The supply of a data center using direct current has enormous potential. Not only does it offer the potential for saving energy. The quality of the DC-level power is better. This will result in the use of fewer components and, ultimately, greater reliability. Goals:
Team qualifications needed: Team must consists of Mechanical power & electrical engineers |
Challenge by: |